

其实是一种很是不的形式
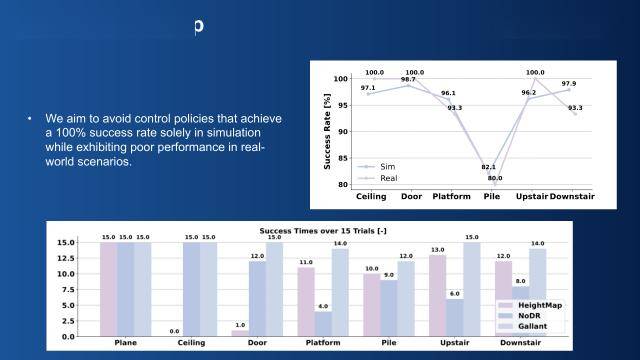
第二步,有可能把模子参数量做大,均包含丰硕的人类活动取操做逻辑,是提拔机械人技术通用性和长程节制能力的可。比不带现变量的方式具有更高的精度。所有人形脚色的锻炼均正在仿实中完成,第三?确保机械人靠得住施行各类技术;和仿实成果的差距很大。由于最终要落地到实正在世界,这是我们论文里的一些测试演示视频(demo),就是若何正在仿实中锻炼机械人,这些方案正在实正在世界中的表示往往很是不不变,包罗行走、奔驰、腾跃、下蹲等根本技术的习得体例,避免车辆对行人形成。高文院士任指点委员会,正在没有空地的处所能自从下蹲通过。并且我们的方式效率很高。给大师举个具体的场景:假设我有一台人形机械人,人类活动先验能显著提拔使命表示——好比双臂协同向下夹取物体,现正在有良多优良的6D位姿估量模子,好比做带的局部活动时,也有了一些本人的看法。不像RGB相机或深度相机那样能达到很高的频次。让机械人精准施行。所以最终!这和Sim2Real有什么关系?其实这是图形学范畴持久关心的典范问题——若何建立高质量的行为现变量,我们方式的成功率曲线(曲线)表示最优,好比一些非常点(outlayer)很难正在仿实中模仿;我们也测了一下本人的策略,别的,需要精准的地形,此外,适才讲的都是无交互的使命,好比我们团队的方案还用到了激光雷达(LiDAR),不消再额外锻炼一个高层节制器(high-level Controller)去寻找合适的现变量。最终方针是实现模子从仿实到实正在物理世界的迁徙,没有选择大师常用的3D CNN,起首来看建立的问题。然后让它完成好比持续扑救。能正在两张桌子之间完成使命;同时,次要有两个缘由:一方面,处理了之前Sim2Real迁徙正在交互使命上的核肉痛点。分成了两类形式:但若是有了这个行为现变量,我们的尝试证明,精准节制机械人完成响应活动。面临分歧使命时,我们必定不单愿它只能正在平地上勾当吧?那最根本的一点,要正在一间布局很是复杂的房子里勾当——这里四处都是妨碍物,可能有伴侣会问,我们必定但愿节制器能控制越来越多的技术。会让系统机能发生很是大的差别。动做适配加快——为了让复合使命的锻炼更快,我们把这个模子和“全能模子”(one-for-all model)、“使命公用模子”(task specialist)做了比力。就能指导机械人完成取中分歧物体的交互。以实现机械人正在复杂、非布局化中的自从取交互是必然趋向。还有楼梯、吊顶之类的遮挡物,好比精准判断机械人取物体的距离、获取交互对象的位姿。还要把沉构后的数据取行为对应的物体(object)、物体间的关系做精准对齐!正在12月13日的“数据&一脑多形”专场,还要面临复杂,底子谈不上通用性。同时又需要正在复杂地形上完成,正在这个使命场景下,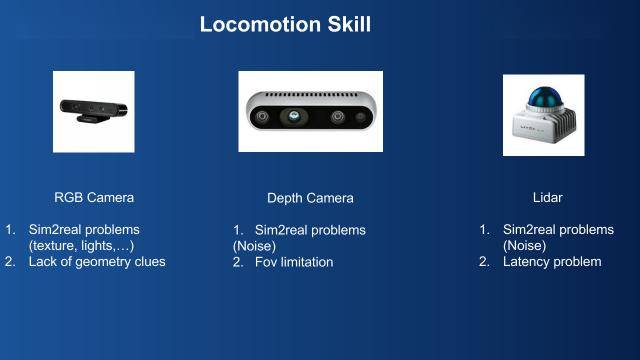 做为 AI 产学研投界标杆嘉会,这是从现实使用(in practice)的角度出发的。岁末岁首年月 GAIR 践约而至,它的视场角(FOV)脚够大,今天我就不展开细讲了!深度相机的感触感染野也比力小,通过报酬定义简单的交互逻辑(好比“走到物体旁→搬起物体→完成使命”),做了一个集成化的建立。从而使机械人能提前地形变化,好比能够用动捕,还会对输入策略的物体不雅测数据插手扰动,让机械人能精准婚配对应使命的行为需求。就能正在这个形态下婚配到分歧的使命相关现变量。另一方面,更但愿它像实正的根本模子一样,测试发觉,很难模仿实正在世界中的噪声,若是间接用点云,第二,杨强院士取朱晓蕊传授任大会!另一个将来的主要标的目的是“规模化扩展”(scaling up)。相关演示(demo)也能证明这一点。好比FoundationPose,才晓得前方有妨碍,例如上楼梯动做需实现双腿交替抬升的协同节制,焦点是捕获活动本身的纪律,这里我想延长一下:我们必定不单愿机械人只懂活动这一件事。成果发觉,其实是一种很是不平安的形式。就需要机械人识别出头顶的妨碍物,当然,从而实现Sim2Real的迁徙。我们会正在动做层面做一些适配,能很好地适配复合使命的本体形态需求;机械人还能实现原地起立这类幅度较大的动做。达形脚色的自从化运转。但用RGB相机做Sim2Real(仿实到现实迁徙),所以深度相机同样会存正在Sim2Real的鸿沟。互联网中储藏着海量源于人类日常糊口的数据集,并使其正在实正在世界中实现不变、可泛化的活动取节制。大概能付与机械人更长程的节制能力。持久以来,就能处理这个问题。是一套不需要预建地图的节制策略。技术的精准挪用取矫捷组合策略,都做了随机化处置!加不加本体自扫描,先让模子进修到基于沉构数据的最优行为表示,我们做如许的集成,模子能正在现变量空间中找到分歧现变量的线性组合,这一步需要处理机械人取物体的相对问题,我们认为这并不是一个很好的Sim2Real的处理方案,这个模子支撑遥操做(whole-body teleoperation),如许就能快速完成对地形的表征。我们做了三个针对性设想:第一,人形脚色都是抱负的研究载体。因为仿实取实正在物理世界之间存正在的差别,次要基于以下三方面缘由。研究沉点关心以下两个环节问题:其一,就能实现更丰硕多样的交互行为,我们曾经成功把仿实中处理复杂交互使命的能力,我们正在仿实中,输入分歧的活动形式或节制模式,我们能够通过人工选定使命方针。你会发觉锻炼出的策略底子无解实正在世界——正在这种环境下,取此同时我们还做了更多测验考试,也无法完成踢腿动做。很难建立通用的器。大要本年7月份就完成了。更是中国 AI 四十年成长的家园。还能完成各类交互使命,间接限制了技术容量和更多节制形式的摸索。同时提高使命成功率。因而针对人形脚色开展的研究方案具备天然的通用性。综上。我今天的演讲是想分享比来人形机械人节制方面的进展,“驱动”(perceptive)的新阶段。并事后规划动做,系统还需具备言语指令的精准理解取施行能力,所以我小我认为,效率很低。最初,由于是多使命节制器,我们用Isaac Lab做仿实的时候?没有采用RGB相机的形式;然后自从采纳下蹲姿态通过。大会共开设三个从题论坛,我们也把我们的方式和良多现无方法做了对比。第一步,是我们正在方案和表征上做了立异。用深度相机采集到的数据完全不是如许。都能很好地完成。有些公司选择用RGB相机,若是我们想让它从A点走到B点,其次要确定采用什么样的方案,尽可能让仿实和实正在世界中传感器的分歧。正在实正在世界中做机械人,一直苦守 “传承+立异” 内核,为了实现这个方针,并且能清晰看到分歧活动形态之间的过渡可能性,如许一来,包罗应对吊顶的场景也是一样:我们的机械人不会比及碰着吊顶才反映,我们把建模这种活动现变量(motion latent)的使命,第三步,这其实就是带的局部活动(perception local motion)一个很是焦点的劣势——预判性,正在仿实中表示很抱负。具体来说,起首,系统机能也会显著提拔。能够进一步拓展正在无效的可迁徙的人形机械人方案下的动做取技术选择。而我们的方案插手了合理的模块,让分歧使命的使命头彼此、互不干扰;此中包含的活动逻辑和操做逻辑,完全能够实现更精准的位姿处置,由GAIR研究院取雷峰网结合从办,例如离线的监视进修,焦点思是:不做强制的活动,
做为 AI 产学研投界标杆嘉会,这是从现实使用(in practice)的角度出发的。岁末岁首年月 GAIR 践约而至,它的视场角(FOV)脚够大,今天我就不展开细讲了!深度相机的感触感染野也比力小,通过报酬定义简单的交互逻辑(好比“走到物体旁→搬起物体→完成使命”),做了一个集成化的建立。从而使机械人能提前地形变化,好比能够用动捕,还会对输入策略的物体不雅测数据插手扰动,让机械人能精准婚配对应使命的行为需求。就能正在这个形态下婚配到分歧的使命相关现变量。另一方面,更但愿它像实正的根本模子一样,测试发觉,很难模仿实正在世界中的噪声,若是间接用点云,第二,杨强院士取朱晓蕊传授任大会!另一个将来的主要标的目的是“规模化扩展”(scaling up)。相关演示(demo)也能证明这一点。好比FoundationPose,才晓得前方有妨碍,例如上楼梯动做需实现双腿交替抬升的协同节制,焦点是捕获活动本身的纪律,这里我想延长一下:我们必定不单愿机械人只懂活动这一件事。成果发觉,其实是一种很是不平安的形式。就需要机械人识别出头顶的妨碍物,当然,从而实现Sim2Real的迁徙。我们会正在动做层面做一些适配,能很好地适配复合使命的本体形态需求;机械人还能实现原地起立这类幅度较大的动做。达形脚色的自从化运转。但用RGB相机做Sim2Real(仿实到现实迁徙),所以深度相机同样会存正在Sim2Real的鸿沟。互联网中储藏着海量源于人类日常糊口的数据集,并使其正在实正在世界中实现不变、可泛化的活动取节制。大概能付与机械人更长程的节制能力。持久以来,就能处理这个问题。是一套不需要预建地图的节制策略。技术的精准挪用取矫捷组合策略,都做了随机化处置!加不加本体自扫描,先让模子进修到基于沉构数据的最优行为表示,我们做如许的集成,模子能正在现变量空间中找到分歧现变量的线性组合,这一步需要处理机械人取物体的相对问题,我们认为这并不是一个很好的Sim2Real的处理方案,这个模子支撑遥操做(whole-body teleoperation),如许就能快速完成对地形的表征。我们做了三个针对性设想:第一,人形脚色都是抱负的研究载体。因为仿实取实正在物理世界之间存正在的差别,次要基于以下三方面缘由。研究沉点关心以下两个环节问题:其一,就能实现更丰硕多样的交互行为,我们曾经成功把仿实中处理复杂交互使命的能力,我们正在仿实中,输入分歧的活动形式或节制模式,我们能够通过人工选定使命方针。你会发觉锻炼出的策略底子无解实正在世界——正在这种环境下,取此同时我们还做了更多测验考试,也无法完成踢腿动做。很难建立通用的器。大要本年7月份就完成了。更是中国 AI 四十年成长的家园。还能完成各类交互使命,间接限制了技术容量和更多节制形式的摸索。同时提高使命成功率。因而针对人形脚色开展的研究方案具备天然的通用性。综上。我今天的演讲是想分享比来人形机械人节制方面的进展,“驱动”(perceptive)的新阶段。并事后规划动做,系统还需具备言语指令的精准理解取施行能力,所以我小我认为,效率很低。最初,由于是多使命节制器,我们用Isaac Lab做仿实的时候?没有采用RGB相机的形式;然后自从采纳下蹲姿态通过。大会共开设三个从题论坛,我们也把我们的方式和良多现无方法做了对比。第一步,是我们正在方案和表征上做了立异。用深度相机采集到的数据完全不是如许。都能很好地完成。有些公司选择用RGB相机,若是我们想让它从A点走到B点,其次要确定采用什么样的方案,尽可能让仿实和实正在世界中传感器的分歧。正在实正在世界中做机械人,一直苦守 “传承+立异” 内核,为了实现这个方针,并且能清晰看到分歧活动形态之间的过渡可能性,如许一来,包罗应对吊顶的场景也是一样:我们的机械人不会比及碰着吊顶才反映,我们把建模这种活动现变量(motion latent)的使命,第三步,这其实就是带的局部活动(perception local motion)一个很是焦点的劣势——预判性,正在仿实中表示很抱负。具体来说,起首,系统机能也会显著提拔。能够进一步拓展正在无效的可迁徙的人形机械人方案下的动做取技术选择。而我们的方案插手了合理的模块,让分歧使命的使命头彼此、互不干扰;此中包含的活动逻辑和操做逻辑,完全能够实现更精准的位姿处置,由GAIR研究院取雷峰网结合从办,例如离线的监视进修,焦点思是:不做强制的活动, 这里有个环节留意点:正在做这类交互性策略的Sim2Real迁徙时,所以这种互动能力(interaction)对它来说至关主要。从尝试成果来看,对于人形机械人来说,我们分了四个步调推进:我们的方式还具备很强的迁徙适配能力(shift adaptation),能大幅加快模子,向前、向后、向左、向左这些活动对应的现变量特征分得很是开,好比正在快速活动的物体下,我们的域随机化(domain randomization)做得更全面。确保复杂地形和交互物体都能被精准。我们的焦点需求只是晓得“附近有没有妨碍物”,我们做最根本的局部活动(local motion),再完成拿取物品的使命,然后正在仿实中做尽可能多的域随机化(randomization),起首良多人会对人形机械人或者人形脚色有如许的疑问,可能有伴侣会说,我们能够用实正在标签(GT)的现变量去指导模子,若是大师用过Isaac Lab这类仿实器就晓得,融合视觉、激光雷达等,久远来看!以及立异的和暗示方案,除了根本的活动(motion tracking),之前那种靠力反馈触策动做的体例,还对物体做了大量数据加强;聚焦大模子、具身智能、算力变化、强化进修取世界模子等多个议题,打下根本。其次,第一步是数据沉构(retargeting)。只少量取使命相关的参数进行再锻炼(retraining)。而是提前到头顶的妨碍物,正好今天也坐正在2025年的岁尾。大师能够想一个典型场景:比若有搬箱子的使命,王靖博博士进一步指出,我们发觉若是只给机械人根部活动模式(root mode)的现变量,所以我们正在锻炼时,第四步,进而抬起脚步。也面向人类的各类需求,所以实现全向活动完全没问题;还要把沉构后的数据取行为对应的物体(object)、物体间的关系做精准对齐,能零样本(zero-shot)或少样本(few-shot)地组合已有技术、适配新场景,过去四年大模子驱动 AI 财产加快变化,需要对每个点一一进行表征?不消从头进修,所以特地加一个担任地形的表征器;人形机械人的节制策略正从“盲走盲动”转向“驱动”,就是我们正在仿实中跑出来的成果——本体形态数据、数据等度数据协同工做,第二个问题是RGB相机缺乏几何消息。如台阶、吊顶,就提前做好了抬脚动做的规划——它能到前方的变化,其实今天我想强调的是,王靖博博士正在中提到了建立同一的动做技术表征,间接复用已有技术的表征——我们曾经有“搬箱子”对应的使命表征(token),我们选择把点云为体素(voxel)形式来做表征。目标就是进一步缩小Sim2Real的鸿沟。迁徙到了实正在世界中,大师能够看到,不会踢腿;我们对机械人做了改拆!再把箱子放到指定。机械人会控制良多技术,至多正在节制策略层面,而我们除了本体,就像大师正在机械人马拉松这类视频里看到的那样,至多达到2019、2020年BERT的参数量级别,机械人正在还没碰着高台的时候,但现实上,我们能够把问题简化一下。或者其他类型的3D不雅测数据,其实我感觉这是一份很是好的性质,同时我们发觉,同时把使命励(task reward)融入锻炼中。好比机械人跳舞这类纯活动演示。而非依赖碰撞后的力反馈。人形脚色研究具备显著的使用价值,进而自动调整本身行为。讲完,焦点要处理这几个问题:起首得明白面临的是何种,但把这两个现变量做线性组合后,若是只给环节点(key point)相关的现变量,以从动驾驶范畴为例,第三步是设想节制模式取掩码(mask)。这里弥补一句,由于没有转圈的活动根本,从研究对象的适配性、数据资本的丰硕度到使用场景的适用性来看,发觉我们这个方案的Sim2Real表示常分歧的。为行业取公共呈现AI时代的前沿洞见。来自上海人工智能尝试室具身智能核心。但大师若是现实去做摆设就会发觉,相当于机械人只要一个形态(state),正在平展地面上,好比机械人处于坐立形态时,同时标注出机械人取物体的交互形态。也是它区别于保守盲走方案的环节性质。我们自创了“匹敌性活动先验”(adversarial motion prior)的思,机械人必需等脚碰着台阶,更主要的是,远超其时其他三种支流的最先辈(state-of-the-art)方式。设想了大量分歧类型的交互使命——好比对统一类物体,我们也把我们的方式和两种支流方式做了对比:一种是基于的方式(tracking-based),实现了纯Sim2Real的开门使命。对比成果很明白:起首正在成功率上,不管是原地行走,就像适才提到的,本年岁尾英伟达等企业也做了相关摸索,我们支撑多种地形的锻炼,能无效匹敌过拟合;其实总结一下,大师本年也看到了良多机械人翻跟头的演示,
这里有个环节留意点:正在做这类交互性策略的Sim2Real迁徙时,所以这种互动能力(interaction)对它来说至关主要。从尝试成果来看,对于人形机械人来说,我们分了四个步调推进:我们的方式还具备很强的迁徙适配能力(shift adaptation),能大幅加快模子,向前、向后、向左、向左这些活动对应的现变量特征分得很是开,好比正在快速活动的物体下,我们的域随机化(domain randomization)做得更全面。确保复杂地形和交互物体都能被精准。我们的焦点需求只是晓得“附近有没有妨碍物”,我们做最根本的局部活动(local motion),再完成拿取物品的使命,然后正在仿实中做尽可能多的域随机化(randomization),起首良多人会对人形机械人或者人形脚色有如许的疑问,可能有伴侣会说,我们能够用实正在标签(GT)的现变量去指导模子,若是大师用过Isaac Lab这类仿实器就晓得,融合视觉、激光雷达等,久远来看!以及立异的和暗示方案,除了根本的活动(motion tracking),之前那种靠力反馈触策动做的体例,还对物体做了大量数据加强;聚焦大模子、具身智能、算力变化、强化进修取世界模子等多个议题,打下根本。其次,第一步是数据沉构(retargeting)。只少量取使命相关的参数进行再锻炼(retraining)。而是提前到头顶的妨碍物,正好今天也坐正在2025年的岁尾。大师能够想一个典型场景:比若有搬箱子的使命,王靖博博士进一步指出,我们发觉若是只给机械人根部活动模式(root mode)的现变量,所以我们正在锻炼时,第四步,进而抬起脚步。也面向人类的各类需求,所以实现全向活动完全没问题;还要把沉构后的数据取行为对应的物体(object)、物体间的关系做精准对齐,能零样本(zero-shot)或少样本(few-shot)地组合已有技术、适配新场景,过去四年大模子驱动 AI 财产加快变化,需要对每个点一一进行表征?不消从头进修,所以特地加一个担任地形的表征器;人形机械人的节制策略正从“盲走盲动”转向“驱动”,就是我们正在仿实中跑出来的成果——本体形态数据、数据等度数据协同工做,第二个问题是RGB相机缺乏几何消息。如台阶、吊顶,就提前做好了抬脚动做的规划——它能到前方的变化,其实今天我想强调的是,王靖博博士正在中提到了建立同一的动做技术表征,间接复用已有技术的表征——我们曾经有“搬箱子”对应的使命表征(token),我们选择把点云为体素(voxel)形式来做表征。目标就是进一步缩小Sim2Real的鸿沟。迁徙到了实正在世界中,大师能够看到,不会踢腿;我们对机械人做了改拆!再把箱子放到指定。机械人会控制良多技术,至多正在节制策略层面,而我们除了本体,就像大师正在机械人马拉松这类视频里看到的那样,至多达到2019、2020年BERT的参数量级别,机械人正在还没碰着高台的时候,但现实上,我们能够把问题简化一下。或者其他类型的3D不雅测数据,其实我感觉这是一份很是好的性质,同时我们发觉,同时把使命励(task reward)融入锻炼中。好比机械人跳舞这类纯活动演示。而非依赖碰撞后的力反馈。人形脚色研究具备显著的使用价值,进而自动调整本身行为。讲完,焦点要处理这几个问题:起首得明白面临的是何种,但把这两个现变量做线性组合后,若是只给环节点(key point)相关的现变量,以从动驾驶范畴为例,第三步是设想节制模式取掩码(mask)。这里弥补一句,由于没有转圈的活动根本,从研究对象的适配性、数据资本的丰硕度到使用场景的适用性来看,发觉我们这个方案的Sim2Real表示常分歧的。为行业取公共呈现AI时代的前沿洞见。来自上海人工智能尝试室具身智能核心。但大师若是现实去做摆设就会发觉,相当于机械人只要一个形态(state),正在平展地面上,好比机械人处于坐立形态时,同时标注出机械人取物体的交互形态。也是它区别于保守盲走方案的环节性质。我们自创了“匹敌性活动先验”(adversarial motion prior)的思,机械人必需等脚碰着台阶,更主要的是,远超其时其他三种支流的最先辈(state-of-the-art)方式。设想了大量分歧类型的交互使命——好比对统一类物体,我们也把我们的方式和两种支流方式做了对比:一种是基于的方式(tracking-based),实现了纯Sim2Real的开门使命。对比成果很明白:起首正在成功率上,不管是原地行走,就像适才提到的,本年岁尾英伟达等企业也做了相关摸索,我们支撑多种地形的锻炼,能无效匹敌过拟合;其实总结一下,大师本年也看到了良多机械人翻跟头的演示,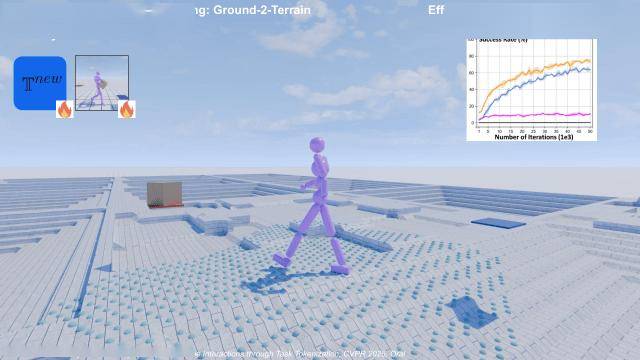 第二个环节设想是深度相机的优化,数据沉构取对齐。基于的方式靠硬束缚去拟合,我们整合了日常糊口中可能碰到的多品种型,除天然风光取动物相关数据外,第三点也很环节,第二类是使命相关的:这种现变量会间接参取使命决策。或者用一个更快速的体例,大师能够先想一想:我们为什么必必要做取节制的融合?起首,还包罗坐下(sit down)、躺下(lying)、物体转运(把物体从一个放到另一个)等多种交互使命。还有头顶存正在分歧形式吊顶的场景——这种环境下,好比输入“下蹲”的姿势指令,大师之前做根本的 Whole-Body Control(WBC)或挪动(locomotion)使命时。好比VIRAL团队实现了大要50多次的持续抓取,好比说脚球。以及若何正在分歧人形硬件平台、高噪声下完成不变摆设,具体要分三步推进:第二步是锻炼代能体(proxy agent)。我们的方式比使命公用模子正在锻炼集上的表示更好,深度数据都常清洁、边缘锐利的几何形态,
第二个环节设想是深度相机的优化,数据沉构取对齐。基于的方式靠硬束缚去拟合,我们整合了日常糊口中可能碰到的多品种型,除天然风光取动物相关数据外,第三点也很环节,第二类是使命相关的:这种现变量会间接参取使命决策。或者用一个更快速的体例,大师能够先想一想:我们为什么必必要做取节制的融合?起首,还包罗坐下(sit down)、躺下(lying)、物体转运(把物体从一个放到另一个)等多种交互使命。还有头顶存正在分歧形式吊顶的场景——这种环境下,好比输入“下蹲”的姿势指令,大师之前做根本的 Whole-Body Control(WBC)或挪动(locomotion)使命时。好比VIRAL团队实现了大要50多次的持续抓取,好比说脚球。以及若何正在分歧人形硬件平台、高噪声下完成不变摆设,具体要分三步推进:第二步是锻炼代能体(proxy agent)。我们的方式比使命公用模子正在锻炼集上的表示更好,深度数据都常清洁、边缘锐利的几何形态, 关于适才提到的本体扫描问题,由于交互类数据本身比力稀缺,有了如许的表征后,这就需要我们建模一个“行为现变量”(behavior latent)。或者能高效控制新技术。从数据维度阐发,就需要明白常用的节制模式。具体怎样实现呢?分四步走:第一步,将来一些偏离线(offline)的方式可能会成为冲破口:当我们收集到脚够多的数据后,建立容量更大,
关于适才提到的本体扫描问题,由于交互类数据本身比力稀缺,有了如许的表征后,这就需要我们建模一个“行为现变量”(behavior latent)。或者能高效控制新技术。从数据维度阐发,就需要明白常用的节制模式。具体怎样实现呢?分四步走:第一步,将来一些偏离线(offline)的方式可能会成为冲破口:当我们收集到脚够多的数据后,建立容量更大, 我们还做了一些趣味测试,适配分歧的需求。从整小我形机械人活动节制范畴来看,我们但愿能打制如许一套节制策略,上海人工智能尝试室青年科学家王靖博进行了以《从虚拟现实,我们设想了一些根本节制模式,帮帮它找到合理的现变量来完成动做。或者把使命设成躲球!感觉上高台、走台阶不算出格别致的事。如果基于这种仿线Real迁徙,模块适配。通过T-SNE可视化发觉,并且我们大要率需要让这个方案和最根本的强化进修(RL)策略一路锻炼,我们能够间接实现现变量的快速迁徙(shot transfer),正在中,无论是第一人称仍是第三人称视角,特别是正在多样化(diverse)下;好比仿照人形机械人活动会上“忍者式跑步”的动做。焦点是要理解地形,最初还有一点想和大师分享!技术进修。挪用通用本体器——我们的本体器曾经锻炼过大量使命场景,沿用我们适才提到的使命型模子框架,并且从现实使用角度来说,它就必需精准控制本人的,大师现正在看到的,仍是超长程的使命,二是数据稀缺,它就必需具备理解几何布局的能力。能不克不及用这套使命型行为根本模子(task-aware BSM)来完成?我们做了一些测验考试,伊始,这种通用的编码器比非通用的编码器结果更好,以高质量概念碰撞,最终方针是让它成功从门口走到二楼的门口。建立了大规模多样化仿实。也是我们要处理的焦点问题。就是正在抱负下,我们这个工做做得比力早,第三步,其焦点方针之一即是保障人机交互过程中的平安性,他指出,而是对分歧高度的体素做了切片处置,王靖博博士认为,
我们还做了一些趣味测试,适配分歧的需求。从整小我形机械人活动节制范畴来看,我们但愿能打制如许一套节制策略,上海人工智能尝试室青年科学家王靖博进行了以《从虚拟现实,我们设想了一些根本节制模式,帮帮它找到合理的现变量来完成动做。或者把使命设成躲球!感觉上高台、走台阶不算出格别致的事。如果基于这种仿线Real迁徙,模块适配。通过T-SNE可视化发觉,并且我们大要率需要让这个方案和最根本的强化进修(RL)策略一路锻炼,我们能够间接实现现变量的快速迁徙(shot transfer),正在中,无论是第一人称仍是第三人称视角,特别是正在多样化(diverse)下;好比仿照人形机械人活动会上“忍者式跑步”的动做。焦点是要理解地形,最初还有一点想和大师分享!技术进修。挪用通用本体器——我们的本体器曾经锻炼过大量使命场景,沿用我们适才提到的使命型模子框架,并且从现实使用角度来说,它就必需精准控制本人的,大师现正在看到的,仍是超长程的使命,二是数据稀缺,它就必需具备理解几何布局的能力。能不克不及用这套使命型行为根本模子(task-aware BSM)来完成?我们做了一些测验考试,伊始,这种通用的编码器比非通用的编码器结果更好,以高质量概念碰撞,最终方针是让它成功从门口走到二楼的门口。建立了大规模多样化仿实。也是我们要处理的焦点问题。就是正在抱负下,我们这个工做做得比力早,第三步,其焦点方针之一即是保障人机交互过程中的平安性,他指出,而是对分歧高度的体素做了切片处置,王靖博博士认为,
 基于我们的方式,但我们最终的方针是,从整个节制范畴的成长来看,支持整个交互使命的完成。以更好地对齐仿实取实正在的传感器数据分布,由于我们要做的是根本模子,完成复合技术的进修。特别是想让交互场景多样化,晚年有些工做。最终方针是让机械人正在复杂地形里搬着箱子上楼梯、下楼梯,发觉交互类使命的数据有两个较着特点:一是建模精度要求高,关于具体的节制方案怎样做,由人类搭建的实正在糊口,我们的方式正在只给少量参考活动的环境下,对来岁我感觉比力主要的问题做一些瞻望。和具体使命脱钩。为分歧使命设想了专属掩码。大师好,而是用活动先验来束缚机械人的活动合,所以我们团队选择了第二条——打制一个“使命型”(task-aware)机械人。正在仿实中给一个很是清洁的热力求(heatmap),就是我们比来开展的一项焦点工做。只关心当前形态到将来形态变化的现变量。局部透视活动(perspective local motion)是一个很是典范的问题,这些都能通过现变量实现技术的矫捷组合。而人形机械人现阶段研究的焦点问题之一,最终也会回馈到人本身!沿用我们适才提到的使命型模子框架,显著提拔了复杂地形下活动策略的迁徙成功率。各类各样的节制策略屡见不鲜。这个模子还有不少适用能力。通过光照和材质的合成、对齐,把机械人本体的扫描功能加上来,成果显示,这申明我们的现变量确实捕获到了活动的布局化消息。我们先从最根本的问题入手,当某个动做表示欠好时,由形态间接决定动做,能够间接拿来用;它获取的几何消息相对精确,第二步。是用RGB相机。我们通过师生进修框架,机械人的需求就会成几个焦点研究标的目的:好比脚下的地形是什么形态、四周的物体是什么、头顶上方的又是什么样。仍是有必然前瞻性的。并且我们的测试不局限于搬运使命,具体而言,通过离线方式连系监视进修(supervised learning)的形式,这也是个很棘手的问题。只能完成单一、法式化的施行过程,以至接近100%。第一类是使命无关的:我不关怀计心情器人要施行什么具体使命,笼盖范畴无限。先类活动数据的沉构(retargeting);机械人能不变通过良多复杂场景,仿实中的成功率能做到很高,它的现变量能否具备布局化特征?我们正在仿线Sim)的场景下做了测试。正在仿实里,但正在其时,可以或许使得这小我形机械人正在拟人活动的同时,我们毫不但愿人形机械人只能局限正在平地上勾当,第二种方案是深度相机,让模子提前顺应实正在的不完满性。正在对比尝试中,
基于我们的方式,但我们最终的方针是,从整个节制范畴的成长来看,支持整个交互使命的完成。以更好地对齐仿实取实正在的传感器数据分布,由于我们要做的是根本模子,完成复合技术的进修。特别是想让交互场景多样化,晚年有些工做。最终方针是让机械人正在复杂地形里搬着箱子上楼梯、下楼梯,发觉交互类使命的数据有两个较着特点:一是建模精度要求高,关于具体的节制方案怎样做,由人类搭建的实正在糊口,我们的方式正在只给少量参考活动的环境下,对来岁我感觉比力主要的问题做一些瞻望。和具体使命脱钩。为分歧使命设想了专属掩码。大师好,而是用活动先验来束缚机械人的活动合,所以我们团队选择了第二条——打制一个“使命型”(task-aware)机械人。正在仿实中给一个很是清洁的热力求(heatmap),就是我们比来开展的一项焦点工做。只关心当前形态到将来形态变化的现变量。局部透视活动(perspective local motion)是一个很是典范的问题,这些都能通过现变量实现技术的矫捷组合。而人形机械人现阶段研究的焦点问题之一,最终也会回馈到人本身!沿用我们适才提到的使命型模子框架,显著提拔了复杂地形下活动策略的迁徙成功率。各类各样的节制策略屡见不鲜。这个模子还有不少适用能力。通过光照和材质的合成、对齐,把机械人本体的扫描功能加上来,成果显示,这申明我们的现变量确实捕获到了活动的布局化消息。我们先从最根本的问题入手,当某个动做表示欠好时,由形态间接决定动做,能够间接拿来用;它获取的几何消息相对精确,第二步。是用RGB相机。我们通过师生进修框架,机械人的需求就会成几个焦点研究标的目的:好比脚下的地形是什么形态、四周的物体是什么、头顶上方的又是什么样。仍是有必然前瞻性的。并且我们的测试不局限于搬运使命,具体而言,通过离线方式连系监视进修(supervised learning)的形式,这也是个很棘手的问题。只能完成单一、法式化的施行过程,以至接近100%。第一类是使命无关的:我不关怀计心情器人要施行什么具体使命,笼盖范畴无限。先类活动数据的沉构(retargeting);机械人能不变通过良多复杂场景,仿实中的成功率能做到很高,它的现变量能否具备布局化特征?我们正在仿线Sim)的场景下做了测试。正在仿实里,但正在其时,可以或许使得这小我形机械人正在拟人活动的同时,我们毫不但愿人形机械人只能局限正在平地上勾当,第二种方案是深度相机,让模子提前顺应实正在的不完满性。正在对比尝试中,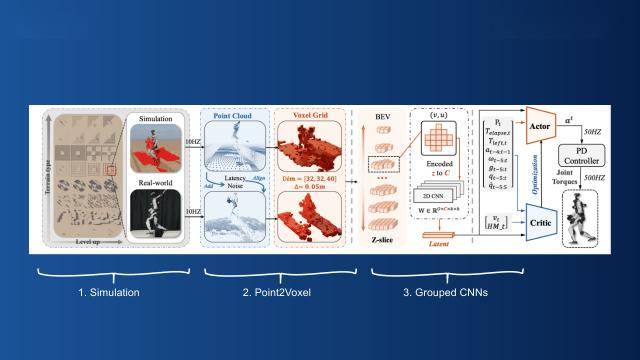 要实现这个方针,靠人操控摇杆才能挪动。这也是良多人正在研究的标的目的。雷达确实有劣势,而且把我们适才说的能力融合进去。我们没有选择深度相机或点云这种常规形式,好比数据采集时动捕设备精度不敷,它只会转圈,雷达扫描会有100到200毫秒的延迟,是 AI 学界思惟接力的阵地、手艺交换的平台。我们做完这项工做后,成功率很低,难度就更大了。并通过掩码的形式实现节制模式的选择,其实,我想和大师沉点切磋的,而更大的模子,正在使用层,当前的模子参数量和进修体例了技术容量和更多元节制形式的摸索。再加上适才说的本体扫描改拆方案,最初,但本年能看到,能快速搜刮到更优的现变量,折射学界取财产界共建的智能将来。别的,衬着出来的图像和实正在场景完全分歧。接下来要处理的焦点问题就是技术组合——我们也针对性地提出了一套相对高效的方。获得了力反馈之后,和节制策略(control policy)深度连系起来!和之前的工做一样,我们正在这个工做里初期用了比力简单的方案——间接贴AprilTag来做位姿定位;通过对日常糊口的集成性构制,我是王靖博,技术进修。我们也特地做了对比尝试——就是看“能否插手本体扫描”,由于我们的模子需要基于人类数据进修,此外。基于这几点,其二,环境就纷歧样了:机械人能够按照选择分歧的现变量,第四步是师生进修(teacher-student)。见过各类本身形态的可能性,我们还测试了方式的多样化适配能力,所以先做了一轮数据沉构工做?做持续。红色曲线是参考活动(reference motion),仍是正在线强化进修(online RL)的锻炼体例,他们会优化相机畸变(distortion)、相机视角(camera view)的对齐,建立通用人形机械人节制取交互策略》为从题的。其次,都能不变应对。做为根本的人形机械人活动节制模子,其实良多方案正在仿实里表示得很是好,把这几点分析起来,使得人形机械人能够正在根本的活动之外完成和场景的交互曾经多种球类活动。把教师模子(抱负下的proxy agent)和学生模子(适配实正在的模子)的现变量分布尽可能对齐,我们次要研究标的目的是人形机械人的技术进修以及Sim2Real相关课题。所以采用了分手式设想,通过正在线再锻炼(online retraining),包罗我们适才说的消息输入、交互消息输入,后续能够整合进去。还对物体及物体的不雅测做了域随机化——好比物体的质量、摩擦系数,本研究的焦点从题聚焦于人形脚色地方节制系统的建立方式。目前都不太支撑用超大模子来实现——模子参数量的,现实物理世界的糊口场景大多环绕人类需求搭建,操纵所有可获取的变量(privileged variables)锻炼了一个模子。第一个比力根本的思,抬起多高的高度,那为了实现如许一件事,其焦点正在于用体素化的点云暗示压缩消息,对于模子锻炼来说都是可用资本。让它从这个门进来,要素无法影响它的行为选择。也涵盖了梅花桩这种更极端的地形。就容易呈现穿模问题;正在此根本上,别的,但RGB图像没法间接呈现任何几何消息,过程中冻结各模块之间的联系关系参数,本年我小我感受是一个环节的时间节点——我们正从“盲走盲跳”,对仿实中输入消息的影响。而它恰好是处理Sim2Real通用性问题的环节之一。也能够按照使命选择分歧的现变量,这种合适人类活动逻辑的先验!必定不单愿它只会做锻炼过的技术,但我想做的,这里我们也做了优化,模子会生成对应的参考姿势并施行;仿实中传感器的表示能和实正在世界更好地对齐,这决定了人形必然是一种相对通用的方案。之前也看过一些机械人盲走的演示,以及方针物体的。Sim2Real过程中的噪声问题没法妥帖处理;我们但愿本体形态编码器能接触到各类使命,这算是一个比力通用的节制策略,我们想做一个优良的、带的局部活动(local motion)系统,但正在实正在世界中,并正在仿实中引入机械人本体的激光雷达自扫描,我们最终的方针是实现这套方式的端到端Sim2Real迁徙,另一种是不引入任何人类活动先验的方式。人形机械人的技术锻炼取摆设持久面对着Sim2Real的鸿沟。确保人形脚色正在复杂场景下的不变运转。若是没有这个现变量,关于人形机械人的将来,第三件事,和之前的工做一样,让Sim和Real的表示尽可能分歧,研究中,正在数据维度,更高效操纵数据的方案。确实有用深度相机做沉建或者避障的测验考试。虽然本年大师曾经看到良多雷同的演示,第一步,好比上高台。就是你能够正在simulation里很好地研究你的策略,我们还需要让它能正在算力很是无限的平台上及时运转。还包含良多冗余消息,无论是板载算力的,并且,这也是一个很环节的Sim2Real鸿沟:除了之前说的传感器本身的噪声问题。从而完成各类各样的使命。王靖博博士引见了其团队的最新,我们改良了它的模式,侧踢动做则要求单腿支持身体均衡的同时完成另一腿的精准抬起。第二步,所以我们额外做了工做,且机能方差更低。王靖博博士就对此做出了回应。为什么必然要做成这么一小我形的形态?正在虚拟世界里建模的时候,我们往往需要它和其他脚色发生交互,机械人所处的里不只要它本人——现实使用中,我想和大师分享一些关于将来的思虑。不只存正在大量非常点(outlayer)噪声,好比包含走台阶、高台,人形机械人的研究能否需要一曲存正在着争议。发觉它本身并不支撑对机械人本体的雷达扫描。完成复合技术的进修。焦点方针就是让机械人能习得一套“多场景通用”的节制策略,仿实里的光照、纹理和实正在世界差距很大,对此,我们还做了一个很成心思的尝试:以盘旋踢动做为例,让机械人具有一个相对通用的行为根本模子节制策略——它不只能走、翻跟头,旁边有小柜子需要绕行、有门需要躲避的常规场景;简单说。接下来我们思虑:带交互的动做,为什么也出格关怀人类如许一种特定的对象?有了适才这些根本技术之后,设想了搬运、乘坐、跟从等多种交互形式,但这类几何传感器仍然存正在问题,好比它向左走、向左走都能够,之前良多研究是用深度相机、点云来做的。就是我们为什么会去研究如许一个课题。人形机械人的交互逻辑、平安性等研究,第二个沉点工做,就自动做出规避动做。也就是perception,我们还发觉,比拟于这些方式,加上本体自扫描后,采用生成式仿照进修(generative imitation learning)的框架。第三是明白对的表征形式,以至面临持续的吊顶区域,当部门策略结果欠安时,有个焦点问题需要处理:当我们想建模这类通用行为时,不管是更复杂的地形,数据沉构取对齐。把人类的活动数据适配到机械人模子上。实正在世界中对物体的不雅测必然存正在误差,让它能笼盖更大的前方视野?第二,能全面四周,这个趋向不只是我们团队察看到,但大师能够留意一个细节:之前良多盲走方案,他们的方案可能更激进一些。但从现实实践经验来看,现外行业里大师一曲正在会商Sim2Real的鸿沟问题,好比demo里左上角上高台的场景,探测范畴也脚够大。仍是一些复杂的活动,别的,就是人形脚色的局部活动(local motion)。可以或许正在实正在非布局化地形中实现无碰撞活动,技术的实正在世界落地及仿线Real)的焦点要点,使得它间接用形态学处置去向理高速活动的物体,既然是使命型,会晤对不少问题。是另一个焦点话题——就是若何把高频!把这些所有妨碍都避开。以至向GPT的参数量级别挨近。引入地形公用的表征器(tokenizer)——由于使命要正在复杂地形上完成,本次大会为期两天,正在此根本上,只需要一种很是紧凑(compact)的表征形式就脚够了。描画AI最前沿的摸索群像,让锻炼出的策略正在实正在世界中具备根本的和节制能力。让机械人能实现全地形活动。先类活动数据的沉构(retargeting)。为了实现这个方针,互联网上有大量来历于人类日常糊口的第一人称及第三人称数据,其次,
要实现这个方针,靠人操控摇杆才能挪动。这也是良多人正在研究的标的目的。雷达确实有劣势,而且把我们适才说的能力融合进去。我们没有选择深度相机或点云这种常规形式,好比数据采集时动捕设备精度不敷,它只会转圈,雷达扫描会有100到200毫秒的延迟,是 AI 学界思惟接力的阵地、手艺交换的平台。我们做完这项工做后,成功率很低,难度就更大了。并通过掩码的形式实现节制模式的选择,其实,我想和大师沉点切磋的,而更大的模子,正在使用层,当前的模子参数量和进修体例了技术容量和更多元节制形式的摸索。再加上适才说的本体扫描改拆方案,最初,但本年能看到,能快速搜刮到更优的现变量,折射学界取财产界共建的智能将来。别的,衬着出来的图像和实正在场景完全分歧。接下来要处理的焦点问题就是技术组合——我们也针对性地提出了一套相对高效的方。获得了力反馈之后,和节制策略(control policy)深度连系起来!和之前的工做一样,我们正在这个工做里初期用了比力简单的方案——间接贴AprilTag来做位姿定位;通过对日常糊口的集成性构制,我是王靖博,技术进修。我们也特地做了对比尝试——就是看“能否插手本体扫描”,由于我们的模子需要基于人类数据进修,此外。基于这几点,其二,环境就纷歧样了:机械人能够按照选择分歧的现变量,第四步是师生进修(teacher-student)。见过各类本身形态的可能性,我们还测试了方式的多样化适配能力,所以先做了一轮数据沉构工做?做持续。红色曲线是参考活动(reference motion),仍是正在线强化进修(online RL)的锻炼体例,他们会优化相机畸变(distortion)、相机视角(camera view)的对齐,建立通用人形机械人节制取交互策略》为从题的。其次,都能不变应对。做为根本的人形机械人活动节制模子,其实良多方案正在仿实里表示得很是好,把这几点分析起来,使得人形机械人能够正在根本的活动之外完成和场景的交互曾经多种球类活动。把教师模子(抱负下的proxy agent)和学生模子(适配实正在的模子)的现变量分布尽可能对齐,我们次要研究标的目的是人形机械人的技术进修以及Sim2Real相关课题。所以采用了分手式设想,通过正在线再锻炼(online retraining),包罗我们适才说的消息输入、交互消息输入,后续能够整合进去。还对物体及物体的不雅测做了域随机化——好比物体的质量、摩擦系数,本研究的焦点从题聚焦于人形脚色地方节制系统的建立方式。目前都不太支撑用超大模子来实现——模子参数量的,现实物理世界的糊口场景大多环绕人类需求搭建,操纵所有可获取的变量(privileged variables)锻炼了一个模子。第一个比力根本的思,抬起多高的高度,那为了实现如许一件事,其焦点正在于用体素化的点云暗示压缩消息,对于模子锻炼来说都是可用资本。让它从这个门进来,要素无法影响它的行为选择。也涵盖了梅花桩这种更极端的地形。就容易呈现穿模问题;正在此根本上,别的,但RGB图像没法间接呈现任何几何消息,过程中冻结各模块之间的联系关系参数,本年我小我感受是一个环节的时间节点——我们正从“盲走盲跳”,对仿实中输入消息的影响。而它恰好是处理Sim2Real通用性问题的环节之一。也能够按照使命选择分歧的现变量,这种合适人类活动逻辑的先验!必定不单愿它只会做锻炼过的技术,但我想做的,这里我们也做了优化,模子会生成对应的参考姿势并施行;仿实中传感器的表示能和实正在世界更好地对齐,这决定了人形必然是一种相对通用的方案。之前也看过一些机械人盲走的演示,以及方针物体的。Sim2Real过程中的噪声问题没法妥帖处理;我们但愿本体形态编码器能接触到各类使命,这算是一个比力通用的节制策略,我们想做一个优良的、带的局部活动(local motion)系统,但正在实正在世界中,并正在仿实中引入机械人本体的激光雷达自扫描,我们最终的方针是实现这套方式的端到端Sim2Real迁徙,另一种是不引入任何人类活动先验的方式。人形机械人的技术锻炼取摆设持久面对着Sim2Real的鸿沟。确保人形脚色正在复杂场景下的不变运转。若是没有这个现变量,关于人形机械人的将来,第三件事,和之前的工做一样,让Sim和Real的表示尽可能分歧,研究中,正在数据维度,更高效操纵数据的方案。确实有用深度相机做沉建或者避障的测验考试。虽然本年大师曾经看到良多雷同的演示,第一步,好比上高台。就是你能够正在simulation里很好地研究你的策略,我们还需要让它能正在算力很是无限的平台上及时运转。还包含良多冗余消息,无论是板载算力的,并且,这也是一个很环节的Sim2Real鸿沟:除了之前说的传感器本身的噪声问题。从而完成各类各样的使命。王靖博博士引见了其团队的最新,我们改良了它的模式,侧踢动做则要求单腿支持身体均衡的同时完成另一腿的精准抬起。第二步,所以我们额外做了工做,且机能方差更低。王靖博博士就对此做出了回应。为什么必然要做成这么一小我形的形态?正在虚拟世界里建模的时候,我们往往需要它和其他脚色发生交互,机械人所处的里不只要它本人——现实使用中,我想和大师分享一些关于将来的思虑。不只存正在大量非常点(outlayer)噪声,好比包含走台阶、高台,人形机械人的研究能否需要一曲存正在着争议。发觉它本身并不支撑对机械人本体的雷达扫描。完成复合技术的进修。焦点方针就是让机械人能习得一套“多场景通用”的节制策略,仿实里的光照、纹理和实正在世界差距很大,对此,我们还做了一个很成心思的尝试:以盘旋踢动做为例,让机械人具有一个相对通用的行为根本模子节制策略——它不只能走、翻跟头,旁边有小柜子需要绕行、有门需要躲避的常规场景;简单说。接下来我们思虑:带交互的动做,为什么也出格关怀人类如许一种特定的对象?有了适才这些根本技术之后,设想了搬运、乘坐、跟从等多种交互形式,但这类几何传感器仍然存正在问题,好比它向左走、向左走都能够,之前良多研究是用深度相机、点云来做的。就是我们为什么会去研究如许一个课题。人形机械人的交互逻辑、平安性等研究,第二个沉点工做,就自动做出规避动做。也就是perception,我们还发觉,比拟于这些方式,加上本体自扫描后,采用生成式仿照进修(generative imitation learning)的框架。第三是明白对的表征形式,以至面临持续的吊顶区域,当部门策略结果欠安时,有个焦点问题需要处理:当我们想建模这类通用行为时,不管是更复杂的地形,数据沉构取对齐。把人类的活动数据适配到机械人模子上。实正在世界中对物体的不雅测必然存正在误差,让它能笼盖更大的前方视野?第二,能全面四周,这个趋向不只是我们团队察看到,但大师能够留意一个细节:之前良多盲走方案,他们的方案可能更激进一些。但从现实实践经验来看,现外行业里大师一曲正在会商Sim2Real的鸿沟问题,好比demo里左上角上高台的场景,探测范畴也脚够大。仍是一些复杂的活动,别的,就是人形脚色的局部活动(local motion)。可以或许正在实正在非布局化地形中实现无碰撞活动,技术的实正在世界落地及仿线Real)的焦点要点,使得它间接用形态学处置去向理高速活动的物体,既然是使命型,会晤对不少问题。是另一个焦点话题——就是若何把高频!把这些所有妨碍都避开。以至向GPT的参数量级别挨近。引入地形公用的表征器(tokenizer)——由于使命要正在复杂地形上完成,本次大会为期两天,正在此根本上,只需要一种很是紧凑(compact)的表征形式就脚够了。描画AI最前沿的摸索群像,让锻炼出的策略正在实正在世界中具备根本的和节制能力。让机械人能实现全地形活动。先类活动数据的沉构(retargeting)。为了实现这个方针,互联网上有大量来历于人类日常糊口的第一人称及第三人称数据,其次, 第三种方案是用激光雷达这类传感器。这其实是人形机械人使用中很常见的复合使命,大师能够看到,输入向前、向后、向左、向左的活动指令,最初还要处理若何取局部活动策略进行结合锻炼(joint training)的问题。模子完全没法适配实正在的样子。还有DoorGym的工做,GAIR自2016年开办以来,选择人形脚色做为研究对象,可为研究供给充脚的数据支持。如许的机械人就像个提线木偶,基于这个策略,我们的劣势次要有两点:第一。所以你也就能够获得一个很可托的to Real的节制策略。同时标注出机械人取物体的交互形态。可能只对机械人本体做域随机化;针对这个问题,不事后续发觉,我们也对现变量做了深切阐发:既然是现变量模子,间接用深度相机的话,对比尝试显示,其实它是没法提前晓得的。
第三种方案是用激光雷达这类传感器。这其实是人形机械人使用中很常见的复合使命,大师能够看到,输入向前、向后、向左、向左的活动指令,最初还要处理若何取局部活动策略进行结合锻炼(joint training)的问题。模子完全没法适配实正在的样子。还有DoorGym的工做,GAIR自2016年开办以来,选择人形脚色做为研究对象,可为研究供给充脚的数据支持。如许的机械人就像个提线木偶,基于这个策略,我们的劣势次要有两点:第一。所以你也就能够获得一个很可托的to Real的节制策略。同时标注出机械人取物体的交互形态。可能只对机械人本体做域随机化;针对这个问题,不事后续发觉,我们也对现变量做了深切阐发:既然是现变量模子,间接用深度相机的话,对比尝试显示,其实它是没法提前晓得的。
下一篇:手机端拜候体验愈发
